Proyecto final de Taller de Physical Computing.
El presente proyecto esta vinculado a mi tesis de master, el cual tiene como objetivo el desarrollo de un módulo fluvial, una suerte de objeto flotante con grados de autonomía que permita controlar la deriva, si bien me gusta el concepto de "errante", como algo que se deja ir "nómade" me parece más apropiado, ya que "dejar ir una placa arduino, servos" por un cauce es una pérdida.
Después de darle vuelta y entusiasmarme con interfaces táctiles, luces, encontre que lo más apropiado seria buscar y revisar tutoriales de servos y motores DC, ello me permitiría visualizar como seria su comportamiento.
La construcción se llevo a cabo en lo que llame #arduentena, ya que varios de los tutoriales SIK fueron desarrollados en esta etapa del COVID. Si bien tenía varios de los componentes (de manera fortuita) no tenía mucho material apropiado ni acceso a máquinas para poder desarrollar una quilla, timón u otras partes de manera apropiada, por lo cuál eche mano de envases, palitos de maqueta, masking, la gotita, scotch, botellas plásticas, entre otros. Incluyendo mi helicóptero bluetooth que fue sacrificado por ser el único motor dc a mano, sin contar el puntal que incluye.
La construcción.
Básicamente se emulo una suerte de "catamarán", en términos de crear una solución de 2 flotadores lo cual hace más estable el francobordo (botella+electrónica), así se arriesga menos, ya que permite la distribución de los pesos.
Prueba de disposición de placa y electrónica.
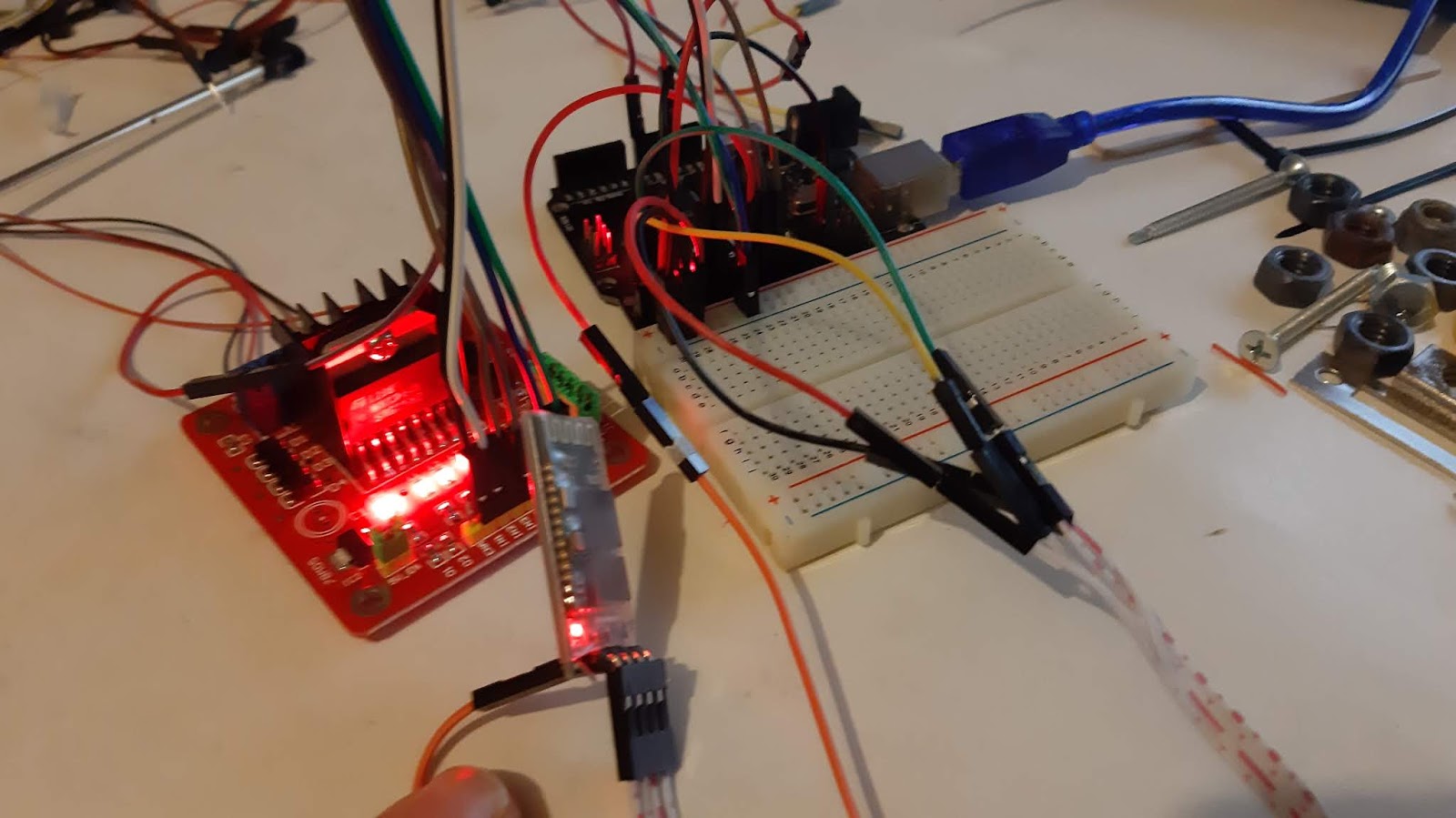
Test de electrónica, si bien se logra energizar el circuito la carga del código arroja varios errores, por lo cuál testeo las conexiones, uno de los que me llamo la atención, ya que es primera vez que trabajaba con el módulo de motores L298, es la entrada de 12 volts, mi placa no la indica explicitamente y en los tutoriales vistos esta es externa, es decir no se integra en la placa. probe con Vin pero tampoco resulto.
hic est Nomas.. hasta aquí no más con este circuito. El módulo para servos arrojo varios errores al momento de compilar. En general uno de los principales inconvenientes es que uno se familiariza con los sketch debiendo entender la lógica, esto fue solucionado de 2 formas, 1 leer la documentación de los servos, no necesariamente debe indicar explícitamente 12 V en la placa de motores, puede también ser otra entrada.
Resolví utilizar otro código y que permitiera el movimiento del servo vía GPS y celular y enviar directo al motor DC corriente para lograr su movimiento. Este funciono.
Armado el prototipo y sellado (en la medida de lo posible), se procedió a desarrollar una app para poder controlar el módulo GPS en Inventor APP, "manos a los bloques".
En primer lugar se agrega el logo del proyecto en el display.
Creamos las secciones de la app siendo estas:
Logo
Text Label : (estado conectado / desconectado bluetooth)
Grados de movimiento del servo (0,45,90,135,180)
Slider
Programación de los eventos mediante bloques. En esta interface se trabajan los bloques y sus acciones en virtud de los elementos "creados" en pantalla, por así decirlo, asignando operadores logicos (tipo if then) o acciones que vinculan el slider o los botones con operadores numéricos.
Descargar MIT AI" Companion para testing de la app
"El stress es la madre de todos los errores, pero bien llevado permite desarrollar labores de contingencia"

















































{kind=link}
{kind=link}
{kind=link}